11 Locomotion
Locomotion
“Life is locomotion. If you’re not moving,
you’re not living”
– The Flash

Locomotion
The most basic explanation of the term “locomotion” is that it is the task of independently moving from one place to another. However, getting from one place to another can be done in a variety of ways and involves many interactions of systems and constraints. Strength and stability, along with the ability to move and adapt to the demands of the environment all influence how locomotion is performed.
Moving from one place to another can be achieved using many different methods. Rolling, crawling, creeping and walking are all ways of navigating through the environment. Once walking or erect locomotion is possible, additional movement patterns of locomotion including running, galloping, hopping and skipping can emerge.
Infancy
Rolling is the earliest movement pattern used for locomotion and is defined as moving from supine to prone or prone to supine. Initially, infants will roll “as a log” in which the body moves as a unit. Afterwards, infants begin to develop segmental rolling, in which the head of the arms initiate the movement and there is axial rotation at the trunk. Rolling becomes more deliberate and functional for obtaining objects and exploring the environment anywhere between six to nine months.
Crawling and creeping are terms that are frequently used to mean the same thing. Both locomotor activities occur with all 4 limbs are in contact with the floor. Technically, however, crawling is when the infant’s chest and stomach are on the ground. Creeping is when only the knees and hands touch the floor. Crawling typical precedes creeping, although
many infants can progress to walking without performing either crawling or creeping.

Figure 11.1 Infant Creeping
Walking and ambulation are terms used to describe locomotion or moving while weight bearing on the feet. It is the first form of upright, bipedal locomotion. A very complex task, walking requires recruitment of the musculoskeletal system along with integration of sensory information from the visual, proprioceptive and vestibular systems to ensure safe and coordinated navigation with the environment.
Gait, refers to the manner in which people walk. Parameters of gait include observations such as stride length, step length, cadence, swing phase, stance phase, double limb support, and walking velocity. Walking is noted to have the timing of 50% phasing. This means that when one lower extremity is halfway through its motion, the opposite lower extremity begins to move. At the beginning and end of each leg’s stance phase, both feet are on the floor at the same time. This is referred to as double limb support.
Most infants will pull up to stand by 12 months and walk along furniture soon afterward. Although many infants will take their first independent steps around their first birthday, others will be able to walk without holding on between 15-18 months of age. At first, each step tends to be independent of the next. During early walking, which looks more like “stepping”, infants have a wide base of support, with the feet flat and the toes pointing outward. The arms are held up in a high guard position and there is minimal trunk rotation. Haywood and Getchell (2014) refer to rate a limiter or controller as an individual constraint or system than holds back or slows the emergence of a motor skill. For the early walker the rate controllers are lack of adequate and balance.
Running is a more advanced movement than walking, but the patterns of movement are very similar. The difference lies largely on the fact that running has a period of non-support, in which no feet are on the floor. This is referred to as the flight phase. Similar to walking, running has a 50% phasing relationship between the legs. Toddlers typically start to run
about several months after they begin to walk, but in order for this to occur, children must be able to generate sufficient vertical ground reaction forces. The beginning runner is often observed to resume a high guard position of the upper extremities and initially, there is no reciprocal arm swing. The arms are used more for balance than for assisting with speed
and tend to swing slightly out to the side, rather than drive forward and back in the sagittal plane. The lower extremities present with flat feet with slight abduction of the swing leg. Very little trunk rotation is observed (Bach, et al, 2021).
Childhood and Adolescence
Once an infant or toddler has been walking independently for three – six months, temporal phasing becomes more consistent. During this time, at approximately 4.5 months of walking, the base of support will decrease, followed by a more consistent heel-strike. Between the ages of 2.5 – 3 years, the toddler will demonstrate reciprocal arm swing with a fairly mature walking pattern observed between five – six years of age. By the age of seven, the time spent in single limb stance is similar to that of an adult and the center of mass has descended
to the level of the L3 vertebra. In addition, maturity of the vestibular ocular reflex reaches adult functioning around age 7, allowing for enhanced postural control during upright walking.
Proficient walking is characterized by an increase in stride length which reflects greater application of force and greater hip extension at push-off. In addition, there is a reduction of hip external rotation and toe-ing which result in a decreased base of support. This allows for forces to be exerted in the sagittal plane. Pelvic rotation becomes evident in more proficient walking. This allows for full range of lower extremity motion as well as maturity of the reciprocal arm swing, such that as the leg moves forward, so does the opposite arm.

Figure 11.2 Children Running
With an increase in balance, the forward trunk inclination, often seen in beginner walkers, decreases. Stride length increases throughout adolescence, in part due to skeletal growth. After that, the gait pattern remains consistent young and middle adulthood.
For many, running becomes proficient during late childhood and adolescence, although not everyone achieves the most efficient form of running. Limitations may be due to skeletal and muscular imbalances, suggesting that age and development also do not guarantee a perfect running form. Progressing from a beginner running pattern to a proficient
running pattern is consistent with the changes observed when a child advances from an early walker to a proficient walker. Observations include in creased stride length, a more narrow base of support, trunk rotation, and a reciprocal arm swing in the sagittal plane.
Adulthood and Older Adulthood
Within the older adult population, there is great anatomical and physiologic variation. Healthy, active older adults in their 60s and 70s may walk with the same gait pattern they used as 30 year olds. Others however, depending on their medical history and co-morbidities, may demonstrate pathological gait deviations or an exaggerated decline of proficient walking. Figure 11.3 illustrates gait changes that are associated with normal aging changes. With further declines of strength and balance, which may or may not be due to pathological conditions,
additional gait changes can be seen.
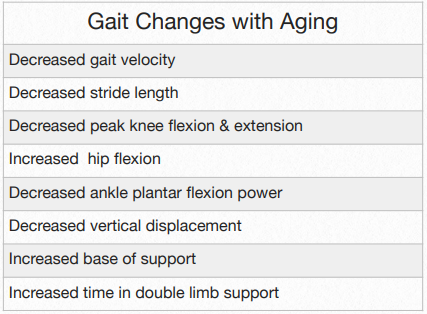
Figure 11.3 Gait Changes with Aging
The most commonly reported gait finding of older adults is slower walking speed. Because gait velocity is the product of stride length and cadence, it is important to consider these gait parameters together when assessing older adults. Many healthy people in their 60s and 70s maintain a preferred stable gait speed, although maximum walking speed declines steadily throughout adulthood. But, regard less of health status, most older adults in their 80s present with a marked decline in their preferred walking speed.
Not surprisingly, ground reactions forces will decrease throughout middle and late adulthood, due to aging changes in the muscular system. In addition, alterations in proprioception, will affect postural control. Together, these changes will result in older runners having a decreased stride length and slower running speeds compared to younger versions themselves. (Silvernail, et al, 2015). Nevertheless, running can be maintained well into the 80s with proper exercise.
Other Locomotor Skills
Jumping
Because locomotion is the task of moving from one place to another, locomotion can take many forms. Jumping, hopping, leaping, galloping and skipping are different ways of getting from point A to point B. Jumping is the action of propelling oneself off the ground and landing on two feet. This can be performed either vertically, or horizontally as in a standing long jump. Characteristics of an early jumper include a one-foot take-off and/or landing and limited preparatory movements of the upper extremities, hips and knees. Many children learn to jump down first, off of a step as an example. This can sometimes be observed as early as two years of age, especially if the step height is low. Over the next four six months, children can be observed to jump off the floor with both feet. By the age of three years, many children can change their trunk angle at takeoff to make either a vertical or horizontal leap, however, beginner jumpers tend to keep the trunk too erect during a horizontal jump. More skillful jumpers appear to tip forward at the start of takeoff. In addition, a beginner jumper will tend to be flexed at take-off and will use the arms to “parachute” for a landing (Haywood & Getchell, 2014).
A proficient jumper on the other hand, will leave the ground with the feet at the same time with the hips and knees fully extended. The trunk is inclined more than 30 degrees at takeoff and the arms lead the jump. With practice, children can make refinements in the jumping pattern and elementary school children will typically increase their broad jump distance by three -five inches per year and their vertical jump by two inches per year, but distance and height can be widely variable from child to child and not everyone masters jumping in childhood or even adolescence (Clark, et al, 1989).

Figure 11.4 Children Jumping
Hopping
Hopping is when individuals propel themselves off the ground with one foot and land on the same foot. To hop, a person needs to have enough strength, balance and power to absorb all the body weight on one foot, which provides a very small base of support. Although most adults don’t need to jump, complex sport and dance moves often require the ability to hop.
At approximately 2-1/2 years of age children demonstrate the ability to balance momentarily on one foot. This skill, in addition to jumping with two feet, are necessary precursors to hopping. By the time children are 3-1/2 years old, most are able to hop a couple of times on one foot, although the movement pattern is immature. Children develop proficiency in hopping until approximately ten years of age. With early hopping, the support leg is lifted, rather than used to project the body and the arms are inactive. Typically, the swing leg is held rigidity in front.
With proficient hopping, the swing leg leads the hop and pumps up and down while the support leg reaches full extension. The arms move reciprocally with the legs which help to generate forward momentum. To hop efficiently, a person must be able to balance on one leg for a succession of hops, during which time the base of support keeps changing. In addition, the individual must to able to generate enough force to propel the body, recover, and quickly generate enough force again. As opposed to running, which allows for alternating force generation between two legs, hopping requires repeated demands on just one lower extremity. Thus, hopping requires more effort than running (Haywood & Getchell, 2014).
Galloping and Skipping
Galloping and skipping are two forms of locomotion that require the fundamental movements of stepping and hopping. Galloping consists of a step on one foot, followed by a leap-step on the other foot. The same leg always leads with the step. Skipping is a step and a hop on the same foot. The lead leg alternates, so that the pattern is step-hop on the right foot, step-hop on the left foot, and so on. For both galloping and skipping, early attempts are usually awkward and stiff. The step or stride length is short, there is little arm movement, and trunk rotation is minimal.
Galloping develops before skipping and is the first asymmetric gait-type motor pattern observed in young children. Whereas running has 50% phasing of the lower extremities, galloping is uneven because the step take longer than the leap-step. Regardless of age, gallopers will tend to use one of 2 timing patterns: a 65%/35% phasing in which the step takes twice as long as the leap-step; or a 75%/25% phasing in which the step takes 3 times longer than the leap-step. (Clark & Whitall, 1989)
Most children will begin to gallop before they hop and will do so after they have firmly established a running pattern. This means that children will exhibit early galloping characteristics between the ages of two – three. By four years of age, just under 50% of children are able to gallop, but by seven years of age, most children have developed a proficient galloping pattern.
Skipping is usually the last locomotor pattern to emerge, which is initiated between the ages of five to seven, with a little more that 50% of five year olds year able to demonstrate early skipping. At first, a child might perform a unilateral step-hop. In other words, a skip with the dominant leg and just a running step with the other leg. When children begin to skip with both legs, it is not uncommon to observe occasional interruptions of the pattern with an interjected step or a gallop.
For both galloping and skipping, proficiency is reflected in movements that are fluid and rhythmical. A proficient galloper will be able to lead with either leg and the arms can assume various positions. Proficient skippers will use their arms in opposition to their legs.
Final Thoughts
Locomotion as a means to to go from here to there is an important element of life. Locomotion, whether it be by rolling, crawling, walking or skipping, allows people to explore and interact with the environment. Through this exploration much is learned. The transition from one form of locomotion to the another is dependent on many factors including the development and integration of multiple systems, along with the environmental conditions. Challenges to locomotion in older adulthood can threaten independence and well-being and should therefore be addressed by an inter-professional team.
References
Bach, M.M., Daffertshofer, A. & Dominici, N. (20210. The development of mature gait patterns in children during walking and running. European Journal of Applied Physiology, 121, 1073–1085 https://doi.org/ 10.1007/s00421-020-04592-2
Cech, D.J., & Martin, S.T. (2012). Posture and balance. In D.J. Cech, & S.T. Martin (Eds.), Functional movement development across the lifespan (pp. 263-287). St. Louis, MO: Elsevier.
Haywood, K.M., & Getchell, N. (2014). Development of human locomotion. In K.M. Haywood & N. Getchell (Eds.), Life span motor development. Champagne, IL: Human Kinetics.
Clark J. E., Philips, S. J., & Petersen, R. (1989). Developmental stability in jumping. Developmental Psychology, 25, 929-935.
Clark, J.E., & Whitall, J. (1989). Changing patterns of locomotion: from walking to skipping. In M.H. Woollcott & A. Shumway-Cook (Eds.), Development of posture and gait across the life span. Columbia, SC: University of South Carolina Press.
Silvernail J.F, Boyer, K., Rohr, E., Brüggemann, G.P, & Hamill, J. (2015). Running mechanics and variability with aging. Medicine and Science in Sports and Exercise.47(10), 2175-2180. DOI: 10.1249/mss.0000000000000633. PMID: 25668398.
Images
Title page. Locomotion. [Image File]. Retrieved from https://image.slidesharecdn.com/mareymuybridge1233020526842528-2/95/mareymuybridge-69-728.jpg?cb=1232999183
Figure 11.1 Infant Creeping. Retrieved from https://www.cdc.gov/ncbddd/actearly/pdf/parents_pdfs/milestonemomentseng508.pdf
Figure 11.2 Children Running. Retrieved from https://snaped.fns.usda.gov/nutrition-education/nutrition-education-materials/physical-activity
Figure 11.4 Children Jumping. Photo by Lighttruth. Retrieved from https://wordpress.org/openverse/image/a3e51039-e90a-4074-8383-251873409fa5
