1 Developmental Theories
Developmental
Theories
“Only through freedom and environmental experience is it
practically possible for human development to occur”.
– Maria Montessori

Human development can viewed differently depending on one’s perspective. Consider the observation that when infants are curious and want to learn about their environment, they’ll find a way to scoot, roll or crawl around in order to explore their surroundings. From this observation, a psychologist may suggest that cognition drives motor development. A physical therapist on the other hand, may suggest that motor development drives cognitive development because development of head control, followed by trunk control, crawling and locomotion affords infants the ability to explore the environment and learn.
The intent of this chapter is for readers to learn about different theories of development and to appreciate connections between them. Additionally it is hoped that through an understanding and acknowledgement of developmental processes, readers will able to 1) identify how a person’s stage of developmental may affect functioning, and 2) establish appropriate expectations and goals given a person’s state of development. This knowledge can help teachers, parents, and clinicians select strategies of engagement that will support positive development during infancy, childhood and adolescence. It addition, understanding the developmental process and aging can inform the best ways to serve and optimize functioning throughout the lifespan.
Here’s a review of some terms related to development and aging that will be used throughout this
book.
Development can be defined as a change in form and function. The process is: 1) continuous with changes in functional capacity, 2) related to, or associated with age, and 3) sequential.
Growth, from a physical perspective, means an increase is size. Growth may or may not be related to development. In children, growth is related to development of multiple organ systems. However, when a 35 year old man increases his size by gaining weight, this is not due to developmental processes. Rather, his change in size is likely due to alterations in diet and physical activity.
Growth charts which illustrate how age is associated with increases in height and weight during childhood can be found on the Centers for Disease Control and Prevention website.
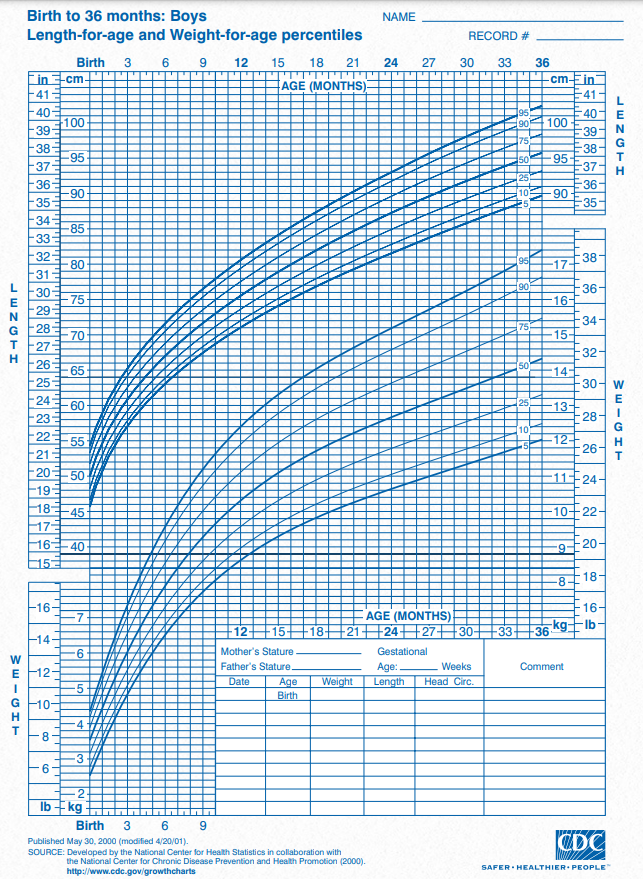
Figure 1.1 Growth Chart for Boys, Birth-36 mos.
Figure 1.1 suggests that if Billy, a 3-year old boy, is taller than 40 inches, he is in the 95th percentile for height. If he weighs 34 lbs, he is in the 75th for weight. This means that given all 3 year old boys in the US, only 5% of them are taller than Billy and 25% weigh more than he does.
Maturation indicates progress toward maturity or a
state of functional integration between bodily systems. Most scientists consider 30 years of age to be the age of maturity. However development, especially in psychological and emotional domains,
can continue after maturity is reached.
Aging is a term typically used to explain changes in systems and functioning with the passage of time. Unfortunately, aging has a negative connotation because we associate it with decline and loss of function. Nevertheless, like growth and maturation, aging is a part of human development.
Senescence is the most correct term for the deterioration of functioning that occurs with becoming old. Declines in function result from physiologic losses that occur after maturity. Impaired functioning increases vulnerability to stress and progressing likelihood of death.
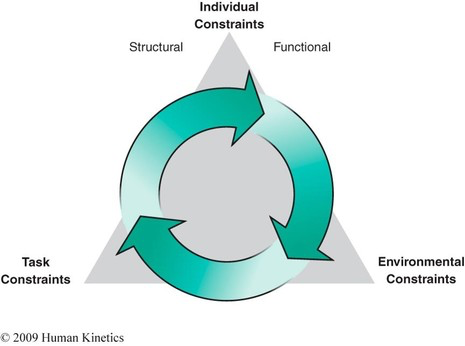
Figure 1.2 Newell’s Model of Constraints (1986)
NEWELL’S MODEL OF CONSTRAINTS
As we begin to think about different theories and perspectives of development, Newell’s Model of Constraints (1986) is a good place to start. (See Figure 1.2) Newell suggests that movements occur from the interactions of the individual, his or her environment and the desired task or goal. An underlying assumption of Newell’s model is that the individual is always undergoing age-related changes and therefore, interacts with the environment and
tasks in altered or modified ways over time. The key elements of the model are the constraints, which are factors that limits or discourages, but can also permit or encourage motor development.
Individual constraints are a person’s unique physical and mental characteristics. Newell (1986) suggests that individual constraints can be thought of as either structural or physical. Structural constraints are related to body structure and include a person’s height, weight, muscle mass, joint integrity, etc. Functional constraints refer to factors in the mental or behavioral domain such as attention, motivation, and fear. Consider the tennis player in Figure 1.3. The amputation of his legs does not prevent him from playing tennis, but it does modify the way he moves around the court and how he uses his trunk to perform his strokes.

Fig 1.3 French tennis player Nicolas Peifer
Environmental constraints are external to an individual’s body and mind. In the physical environment, constraints include features such as gravity, temperature, lighting, surfaces. Through expectations, acceptance and/or rejection, the sociocultural environment can also influence movement behaviors. Consider for example, cultures that value the arts over competitive sports, or societies in which expectations within the domain of motor development are very different for women compared to men.
Task constraints include the goals of the movement or activity, but differ from individual goals or
motivation because these constraints are specific to the task. Take for example, the game of basketball. The goal is to get the ball into the hoop, and the rules dictate how the ball can be moved down the court. Players can dribble or pass the ball to get in shooting distance from the hoop, but they can’t run down the court holding the ball. Task constraints can also include the equipment needed to accomplish the goal. In the case of basketball, imagine a 6 year old at Madison Square Garden trying to score a basket using a regulation size ball. Now imagine that same 6 year old trying to get the ball through the hoop using a size 3 mini-basketball with the hoop set at 6 feet, rather than 10 feet. Without doubt, the movement patterns she uses (and probably her success rate) will be different in the two described situations, based on the equipment used
to perform the task.
It’s important to keep in mind that development is indeed expected to proceed in a fairly stereotypical manner and that certain universal behaviors such as self-feeding, talking, walking, etc. are expected to emerge within a predicted stage of development. Nevertheless, individual differences in development do exist, such as the infant who never crawled, but who has achieved walking by 8 months of age. Parents, teachers and rehabilitation professionals often need to consider individual differences that have been influenced by a variety of constraints as well as the context of universal behaviors when assessing whether an individual’s behavior or performance in within or outside the range of typical development.
BIOPHYSICAL THEORIES OF DEVELOPMENT:
MOTOR
Neuro-maturational Theory
Theories of motor development have emerged and evolved over time, in part due to advancements in scientific technology. The neuro-maturational theory purports that structure precedes function and that development and changes in motor skills are the result of the development and maturation of the central nervous system (CNS). In other words, the nervous system prescribes changes in movement. Dr. Arnold Gesell, an American psychologist and pediatrician observed and filmed approximately 12,000 children at various ages and stages of development. He concluded that children must reach specific maturational stages in development before learning can influence behavior and that a hereditary scheme for development exists for motor skills, adaptive behavior, language development, and social sills. In his book, “Infancy and Human Growth” (1928), Gesell suggested a developmental schedule based on his theory, which was widely used by many practitioners. Today, critics have challenged Gesell’s theory because he gave little thought to environmental factors that could influence development and observed largely middle-class children in a university setting. Nevertheless, Gesell’s research findings continue to guide many on what infants should be able to do and when.
Gesell provided 5 basic principles of development
based on his observations of developing infants.
- Developmental Direction: Development proceeds in 2 directions: cephalo-caudal, or head to toe, and proximal-distal. This developmental principle is a function of pre-programmed genetic mechanisms.
- Individuating Maturation: Development is controlled by internal factors. Only when the appropriate structures have come into being can learning and behavioral adaption occur. Thus, before the development of certain structures, specific training will not be effective.
- Reciprocal Interweaving: Development of motor control is the waxing and waning of elements as they combine in multiple ways to produce different behaviors.
- Self-Regulating Fluctuation: Development alternates between periods of equilibrium and disequilibrium. Periods of equilibrium are marked by stable behaviors and disequilibrium is marked by instability.
Figure 1.4 Asymmetrical Tonic Neck reflex
There is a culmination of stable responses through maturation.
- Functional Asymmetry: Development goes through periods of asymmetry to enable the organism to achieve symmetry at a later stage. Gesell used the asymmetric tonic neck reflex (ATNR) as an example by theorizing that the ATNR promotes visual fixation which leads to hand inspection, eye-hand coordination and prehension approaches (See Fig. 1.4). These behaviors eventually leading to reaching behavior and uni-dexterity.
Dr. Myrtle McGraw, also a neuro-maturationalist, disputed Gesell’s theory, which in her opinion, was too dependent on the proposal that genetic processes within the brain determined infant behavior.
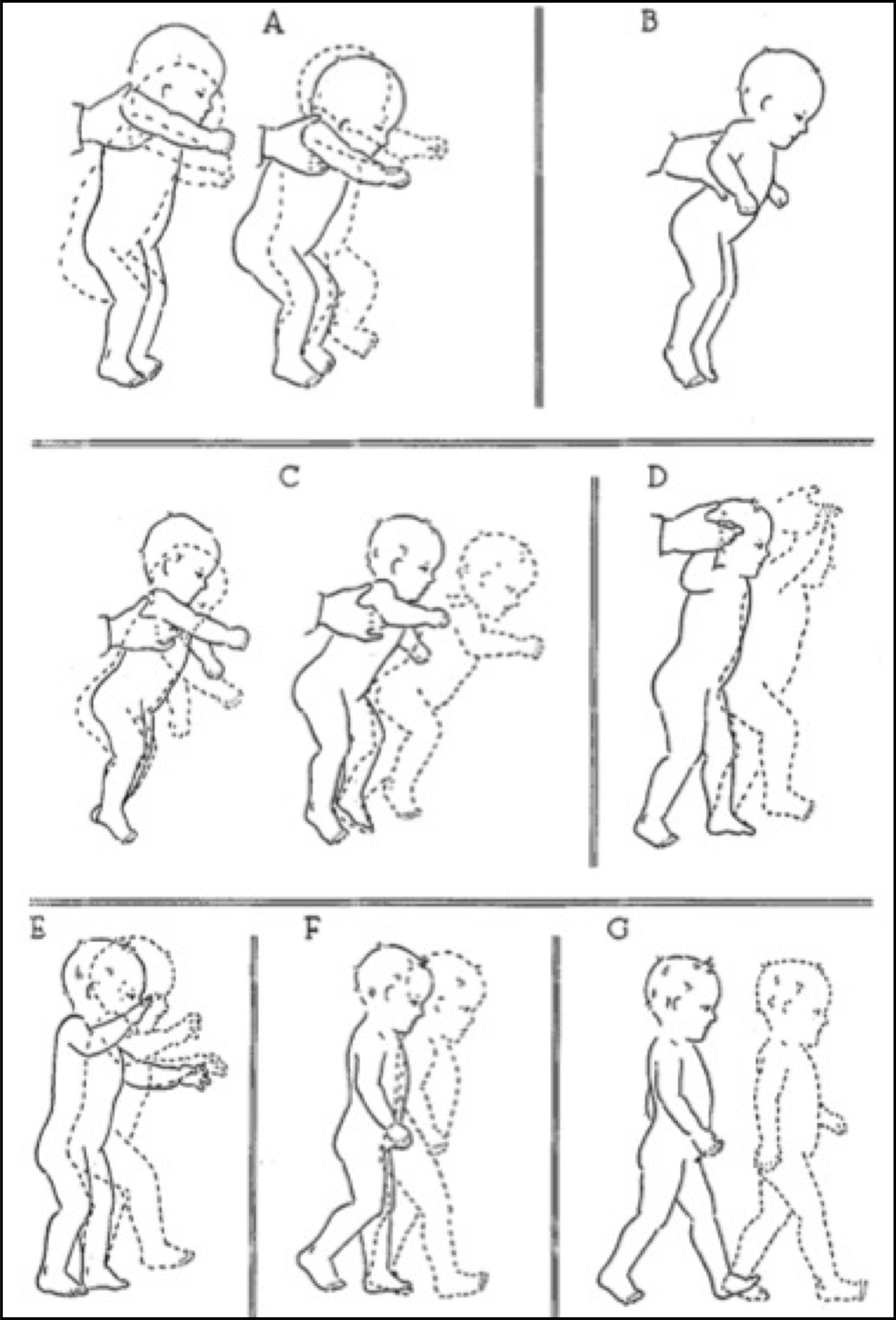
Figure 1.5 McGraw’s Phases of Erect Locomotion (McGraw,1940)
McGraw proposed that human behavior emerges in response to structural growth and maturation of the central nervous system (CNS). At birth, movement is reflexive in nature and is mediated by the lower centers of the CNS. As the cortex develops, it exercises a controlling influence of neuromuscular function and inhibits lower centers of the CNS. McGraw believed however, that early development is not preset or straight forward. Rather it involves interactions between brain growth and behavior which can vary in pace and complexity. McGraw also observed thousands of children at various stages of development and used video recordings as a way to document her observations.
Figure 1.5 shows seven phases of erect locomotion based on her video recordings. Drawing A illustrates reflexive stepping and drawing B represents its integration. In illustrations C and D, the infant is supported. C is when the infant exhibits bouncing behavior, whereas D represents deliberate steps, which is under cortical control. Drawings E and F show refinement of independent walking characterized by increasing postural and balance control and mature coordination of the hips, knees, and ankles.
In addition to walking, McGraw spent hours observing and recording motor behavior in infants and longitudinally described skill acquisition of swimming, rolling, prone progression, sitting, and grasping (McGraw 1939, 1940). McGraw is probably best known for her study of twins Johnny and Jimmy Woods, which created much discussion about the issue of nature versus nurture. In McGraw’s experiment, she afforded one twin physical challenges and opportunities to solve problems that require judgement and experimentation. The other twin did
not receive the same opportunities. McGraw videotaped the twins performing motor skills over many years and demonstrated that early stimulation can accelerate motor development.
Brunnstrom (1970), Bobath (1978) and others have developed therapeutic approaches based in part on principles of hierarchical/reflex theories. However, there are limitations in assuming a strict hierarchy of control. Current theories acknowledge that different levels of the nervous system influence and interact with each other depending on the task or goal.
Motor Program Theory
A motor program theory of motor control suggests that movement patterns can be activated by sensory stimuli or central processes (Bernstein, 1967; Keele, 1968; Wilson, 1961). Experiments with grasshoppers and cats have shown that even without sensory input, the nervous system can produce light or locomotion, respectively (Wilson, 1961; Grillner, 1981). These observations suggest that spinally mediated motor programs or central pattern generators (CPGs) can generate complex movements. The presence of CPGs suggests that in cases of needing to assist the development or retraining of movement, emphasis on functional activities which typically require patterns of stability and movement throughout the body is more advantageous when compared with interventions that focus on isolated muscles or joints.
Dynamic Systems Theory
Nicolai Bernstein (1896-1966), acknowledged the motor program theory, yet challenged it by suggesting that the same central command could result in very different movements. Consider for example, reaching behavior. The movement itself may be driven by a CPG, but the movement will be different if the person is standing with her hands at her sides, compared to the movement that will occur if the person is seated with her forearms resting on a table. Bernstein postulated that these movement patterns are different because the nervous system is only one system of several that interact dynamically to produce movement. There needs to be consideration of the mechanical body itself, with its mass and joints, along with its interaction between external forces such as gravity, and variations in the initial conditions, for motor control to be understood (Bernstein, 1967).
From his view of the body as a mechanical system, Bernstein noted that people have many degrees of freedom due to the ability of joints and body segments to flex, extend, abduction, adduct and rotate. The high degrees of freedom make coordinated movement very complicated. To simplify the degrees of freedom, Bernstein hypothesized that lower levels of the nervous system activate synergies, or groups of muscles, so that all the muscles work together. The higher levels of the nervous system activate the lower levels (Bernstein, 1967).
Kelso and Tuller (1984) advanced the dynamic systems theory by demonstrating that stable movement patterns become more variable just before there is a transition to a new movement pattern, while others have observed this variability prior to the acquisition of new skills in children and adults (Gordon, 1987; Thelen & Smith, 1994: Wollacott & Shumway-Cook, 1990).
Because the dynamic systems theory suggests that movement emerges from the interaction of multiple systems, rehabilitation, education and movement professionals must consider all elements when helping persons overcome faulty movement patterns. The initial conditions of the environment and the person in the environment, speed, degrees of freedom, and gravity are examples of elements that need to be appreciated, because a change in one, alters the interaction of all the elements.
In addition, dynamic systems theory suggests that variability of movement may not always be a reflection of error. Rather, movement variability may be an important component on the road toward functional movement patterns and goal achievement.
BIOPHYSICAL THEORIES OF DEVELOPMENT:
BEHAVIOR
From a biophysical perspective, development requires basic anatomic structures and physiologic functioning. Let’s broaden the lens however, to include not just motor development, but also social and cognitive development. One approach to describe or explain behavior and development from a biophysical perspective is the mechanistic view, which interprets the body as a type of machine. For example, the heart is a pump and the arteries are pipes, which can be “fixed” when “broken or weak” through surgery and the placement of hardware (think valve replacements and stents). Inherent in the mechanistic view is the concept of reductionism, which suggests that organisms can be understood by looking at their most basic element. In humans, that might mean one’s DNA.
Contemporary research on the physiologic basis for behavior (as opposed to the psychological or social basis for behavior) has gained sophistication with advancements in technology that allow us to better study the brain, nervous system, endocrine and immune functioning and physiological responses in a variety of situations (Bari & Robbins, 2013; Lindquist, Satpute, Wage, Weber, Barrett, 2016). Findings from this type of research support more of an organismic view of development, rather than a mechanistic one. An organismic view embraces the concept of holism which suggests that the whole is greater than the sum of its parts. As organisms become more complex new processes and new characteristics emerge, which cannot be explained by assessing or defining the individual parts.
Stemming from these two biophysical views are the biophysical theories of development. When applied to behavioral development, the biophysical theories can be categorized as either genetic or bio-neurochemical, but they may not be mutually exclusive.
Genetic
When thinking about genetics and development first consider the Mendelian Law of Inheritance which simply stated, accounts for that fact that if a dominant gene for a trait or characteristic is found in at least one parent, on average, one-half of the children will inherit it. Certainly, the human gene project has advanced our understanding of the role genetics in development, although there are still many unanswered questions about the role of genetics specific to emotional, social, moral or spiritual development (Campbell, Schermer, Villani, Nguyen, Vickers, Vernon, 2009).
An intersection of heredity, genetics and behavior can be found in the diathesis-stress model, which suggests that for some disorders to develop, there needs to be an inherited risk factor or predisposition (aka diathesis) and exposure to some type of environmental stress. Using this model or view, people with a particular gene variant, say for mental illness, would develop a psychiatric illness when certain stressors occurred in life. Someone with a different version of the same gene (called an allele) could however, encounter the same stressors but would not experience a mental illness. Belsky and Pluess (2009) suggest however, that this model may be incomplete and that based on contemporary research, the function or phenotypic characteristics of the genes may need to be explained as “plasticity factors” rather than “risk factors”. This means that rather than having a risk for certain illnesses, people may have brains that are more responsive to the environment. Thus, if those individuals were not bombarded with environmental stressors, but instead were exposed to a supportive, nurturing environment, they would be more likely to develop beneficial psychological characteristics. The principle of differential susceptibility implies that people differ in their susceptibility to both positive and negative effects of different environments.
Another principle of heredity that can be used to understand how differences in heredity may exert influence over behavior is the principle of differential
exposure. This principle can be thought of when an individual’s inherited characteristics triggers or causes reactions from people, which in turn affects the individual’s behavior. For example, physical attractiveness is largely inherited and it has been demonstrated that people will react more favorably to those who are attractive compared to those who are viewed to be less or unattractive (Clifford & Walster, 1973; Reis, Nezle, & Wheeler, 1982; Sorell & Nowak, 1981). Overtime, the reactions of others may contribute to an individual’s self-concept and affect his or her behavior.
Bio-Neuro-Chemical
Biochemical theories of development propose that there is a relationship between biochemical factors within the body and behavior. For example, neurotransmitters and hormones such as dopamine, epinephrine, norepinephrine and serotonin are linked to emotional states of arousal, fear, rage, pleasure and motivation. Thus, varying levels of these biochemicals can facilitate influence behavior which can affect social, cognitive and physical development. However, the exact mechanism of how neurochemical factors influence behavior and personality
is still under investigation. It does appear that temperament may have a biological basis and that genetic factors may influence early and enduring behaviors related to emotionality, s ociability, attention, persistence, etc. (Saudino, 2005). Nevertheless, it continues to be difficult to discern the bio-neurochemical factors from the environmental effects on behavior. This may be especially true when considering the development of persons who demonstrate personality traits such as shyness and extroversion. Regardless of the etiology or mechanism, introverts and extroverts exhibit very different behaviors and experience the world differently from each other, in part, due to the experiences they seek and the reactions they receive from others.
PSYCHOLOGICAL THEORIES OF DEVELOPMENT: PSYCHOANALYTIC
Freud’s Stages of Psychosocial Development
Psychological theories of development help us to think about and understand factors that influence human thought, learning and behavior. Psychoanalytic theories are based on the dynamics of personality development and are the basis for psychoanalysis, a strategy for intervening with people who have psychological distress. Psychoanalytic theory was originated by Sigmund Freud (1856-1939) who proposed that childhood experiences and unconscious desires influence behavior.
Freud described the human psyche or personality as having 3 interacting elements: the id, the superego, and the ego (Fig. 1.6). The id is the primitive part, comprised of sexual and aggressive drives. The super-ego is the moral compass, committed to an innate awareness of right, wrong and justice. The ego is the pragmatic, realistic element that negotiates and mediates between the desires and impulses of the id and the moral high-ground of the superego (Freud, 1976).
Based on his work with persons with mental illness, Freud developed a developmental theory of personality based on psychosexual stages (See Figure 1.7) and proposed that the pleasure seeking id focuses on erogenous areas or the body and that this
Figure 1.6 Freud’s Theory of Personality
psychosexual energy is the primary driver of behavior. Conflicts that arise during any or all of the stages were considered by Freud to have life long influences on personality and behavior. As an example, problems during the oral stage may focus on
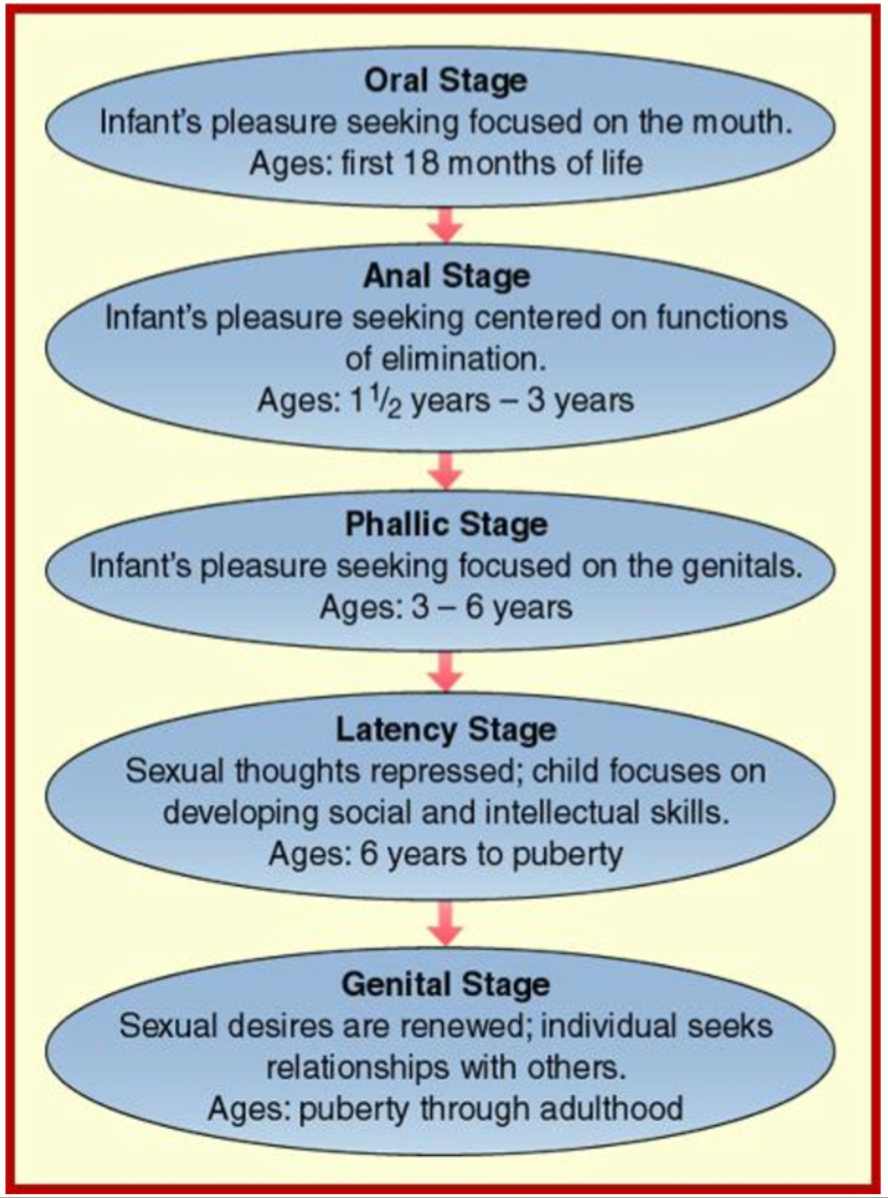
Figure 1.7 Freud’s Stages of Psychosexual Development
weaning, which in the future, may be associated with dependency or aggression. Problems of toilet training, which occur during the anal stage, may be related to stinginess later in life.
In order to deal with conflicts and problems in life, Freud proposed that the ego employs a range of unconscious processes to be able to ward off uncomfortable feelings and anxiety. These processes, known as defense mechanisms were further developed and described by Freud’s daughter, Anna Freud (Figure 1.8).
Erikson’s Theory of Psychosocial Development
Similar to Freud, Erik Erikson (1902-1994) believed that personality develops in a series of stages. Unlike Freud however, who focused on infancy through adolescence, Erikson’s theory includes the impact of social experiences throughout the lifespan. Central to the stages of psychosocial development is ego identity, defined by Erikson as the conscious sense of self that we develop through social interaction. Thus, ego identity is not rigid or stagnant. Rather, it has the capacity to change through new social interactions, experiences, and information
(Erikson, 1980).
Erikson proposed that the ego is adaptive and it’s development occurs as it encounters social situations and conflicts. Similar to Freud, Erikson believed that personality develops in a fairly predetermined order, such that one stage builds upon a previous stage. If the social experiences and challenges in one stage are dealt with well, feelings of mastery and confidence emerge. If the stage is poorly managed, the result can be a sense of inadequacy. Thus, successful completion of each stage results in a healthy personality, one that has acquired basic virtues or strengths, which can be used to manage subsequent conflicts. Failure to successfully handle a stage can reduce the ability to complete the next or future stages, which can have a negative effect on the ego. However, these stages can be successfully resolved at a later time through other social situations and relationships.
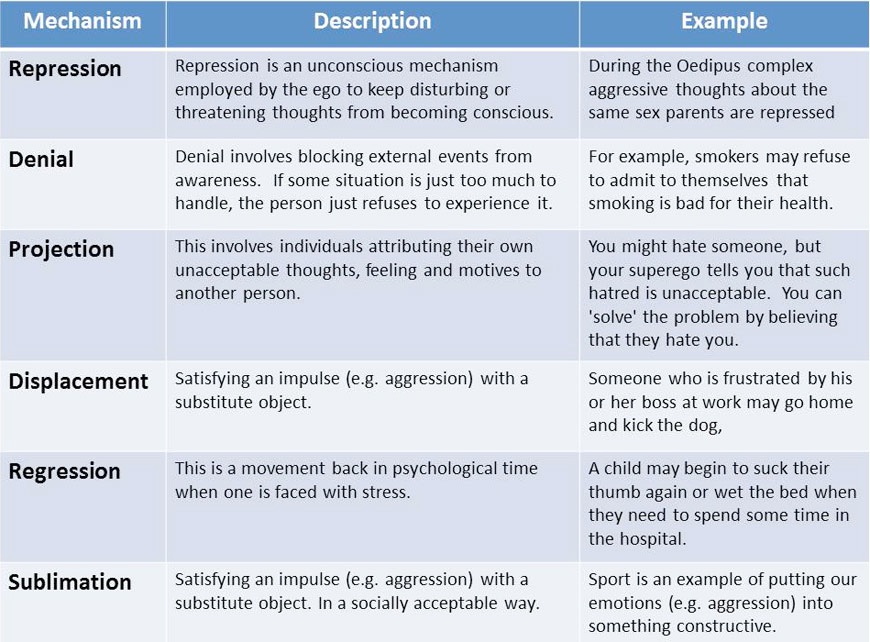
Figure 1.8 Freud’s Defense Mechanisms
To gain an understanding of Erikson’s conflicts and virtues, consider the Initiative vs. Guilt stage (Figure 1.9). Between the ages of 3 and 5, children frequently assert themselves and are beginning to interact with other children. They start to make up games and initiate activities with both children and adults. When opportunities are provided and this behavior is supported, children feel secure in the ability to lead and make decisions. They develop a sense of initiative. If however, this tendency is inhibited either by criticism or lack of opportunity, children may develop feelings of guilt. They may believe that they are a nuisance and therefore retreat to the role of a follower rather than a leader. This can lead to deficits in self-initiation.
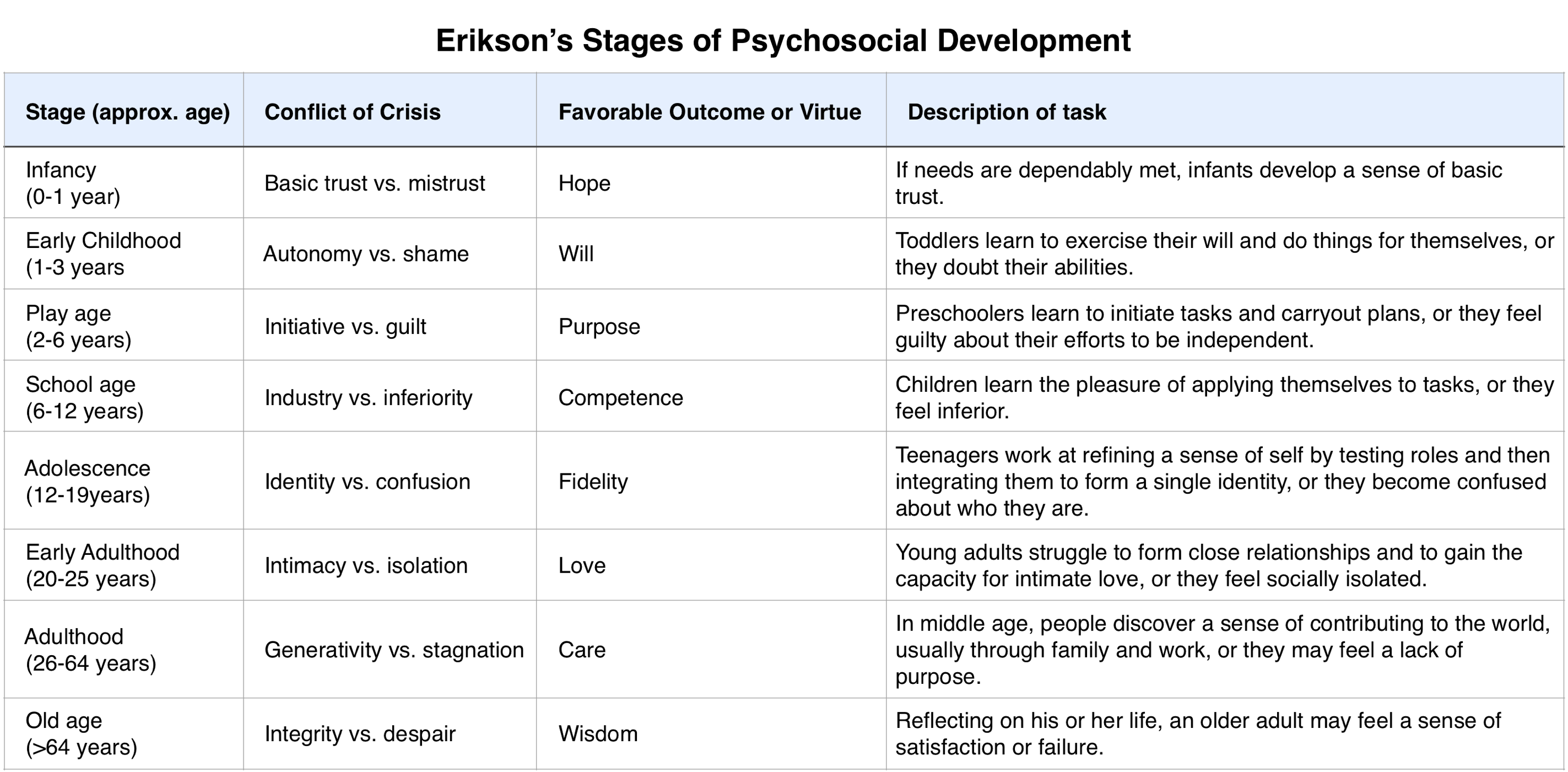
Figure 1.9 Erikson’s Stages of Psychosocial Development
The Initiative vs. Guild stage is also a time when children begin to ask many questions. If these questions are treated as trivial, a nuisance, or perhaps worse, embarrassing, children again may perceive they are a nuisance and develop a sense of guilt. Although some guilt may be necessary for children to learn self-control and develop a conscious, feelings of guilt can cause children to limit their interactions with others or inhibit creativity. Success in this stage will lead to the virtue of purpose, striking a balance between initiative and guilt.
PSYCHOLOGICAL THEORIES OF DEVELOPMENT: LEARNING/COGNITIVE
During the first half of the 20th century, a new school of thought was developing in the field of psychology. Many psychologists began citing a need for scientific inquiry and argued that psychology needed to study observable and quantifiable behaviors. From this sentiment, cognitive/learning theories emerged.
Behavioralism
Behavioralism is a psychological theory that emerged in the early 20th century as a response to the call for scientific inquiry into psychology. The assumption of behavioralism is that people are reactive organisms, who respond to conditions of the environment. Thus, behaviors develop and are acquired through conditioning. Behaviorists believe that responses to environmental stimuli drive human action and that self-concepts such as love and joy, which cannot be measured are less important. Strict behaviorists suggest that any one can be trained to perform any task, within the limits of physical abilities, regardless of background, personality, and intellect. John B. Watson, considered by many to be the “father” of behaviorism wrote,
“Give me a dozen healthy infants, well formed, and my own specified world to bring them up in and I’ll guarantee to take any one at random and train him to become any type of specialist I might select—doctor, lawyer, artist, merchant-chief and, yes, even beggarman and thief, regardless of his talents, penchants, tendencies, abilities, vocations, and race of his ancestors.”
– John Watson, Behaviorism, 1930
Watson made a case for behaviorism by demonstrating that fears and phobias could result from conditioning and be unlearned through conditioning. Take for example, a person with an extreme fear of spiders. Behaviorists would claim that the phobia resulted from environmental conditioning and that treatment would need to include environmental stimuli appropriate for minimizing fear. Joseph Wolpe (1915-1997) developed the behavioral strategy known as systematic desensitization to do just that (Wolpe, 1988). In the example of a spider phobia, the first environment might include a small spider in a tightly sealed jar 5 feet away from the client. The therapist convinces the client that the spider doesn’t have an escape route and proceeds to teach the client deep breathing and muscle relaxation, activities that are incompatible with fear and anxiety. Once the client masters the relaxation techniques, the therapist, modifies the environment to include a larger spider or closer proximity to the spider, depending on the client’s hierarchy of fear. Eventually, the therapist presents the spider to the client in an open container or outside of a container. The goal is for the patient to remain relaxed in that environment, thereby conditioning himself to not fear spiders. Today, this training can be enhanced with biofeedback of muscle activity or galvanic skin response. Rehabilitation and medical professionals can apply systematic desensitization to assist patients who are fearful of certain interventions or who need to undergo painful procedures.
Classical Conditioning
Conditioning falls into two major categories, classical and operant. Classical conditioning is a learning process that occurs through the association between an environmental stimulus and a naturally occurring stimulus. This association was first noticed by Ivan Pavlov (1849-1936), a Russian physiologist who was investigating salivation in dogs as a response to being fed. He eventually noticed that the dogs began to salivate when he entered the room, regardless of whether he was going to feed them (Pavlov, 1984). Pavlov’s observations can be used to illustrate classical conditioning (Figure 1.10).
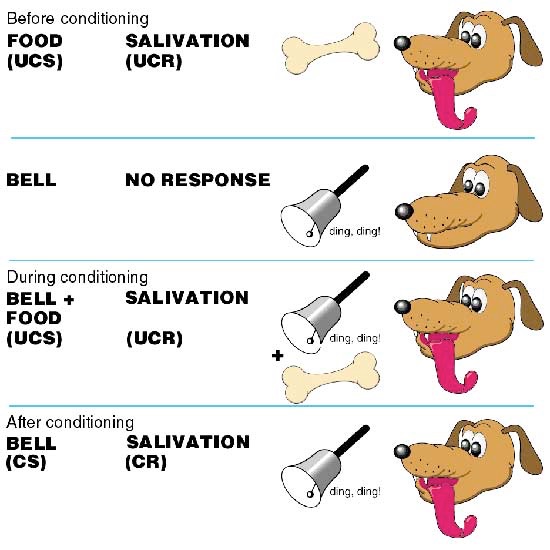
Figure 1.10 Pavlov’s Dog
Before conditioning, food was the unconditional stimulus (UCS). When the food was smelled or presented the dogs salivated. Salivation was therefore, the unconditional response (UCR). The bell, which rang when Pavlov opened the door, did not initially stimulate a response from the dogs and was considered a neutral stimulus. During the next phase of the classical conditioning process, the neutral stimulus (bell) is repeatedly paired with the UCS and the UCR (salivation) occurs. As a result of this pairing, an association between the neutral stimulus and the USC is formed, such that the dogs begin to salivate when they hear the bell, now referred to as a conditioned stimulus (CS). Presentation of food (UCS) is no longer needed to ensure a salivation response.
Operant Conditioning
Operant conditioning is distinguished from classical conditioning because it deals with behavior that “operates” on the environment and is maintained by its consequences. In operant conditioning the consequences can be used to modify the behavior. Edward L. Thorndike (1874-1949) proposed the 3 laws relevant for the association of behavior and consequences (Thorndike, 1932).
The Law of Effect states that any behavior that is followed by a favorable consequence will likely be repeated. Any behavior that is followed by an unfavorable consequence is likely to not be repeated.
The Law of Readiness refers to the preparatory set of the learner. Learners must be physically and mentally ready to learn. If they are ready, then the act of learning is satisfying and not doing so annoying. If they are not ready to learn then learning is dissatisfying and acquisition of new information or skills will not be achieved.
Thorndike’s Law of Exercise states that the strength of the connection between a response and a situation depends on the number of times that response is elicited in that situation. In other words, practice will result in strong connections. When practice is discontinued, the connection will weaken and a decline in performance will occur.
The behaviorist B.F. Skinner (1904-1990) was heavily influenced by Thorndike. Skinner suggested that the concept of free will is just an illusion and that human behavior is the direct result of conditioning (Skinner, 1938). Perhaps Skinner’s most famous experiment included “Skinner’s Box” (Skinner called it a lever box), a container with an internal lever that an animal could press in order to obtain food or water as a type of reinforcement (Figure 1.11). Punishment was provided via an electric shock.
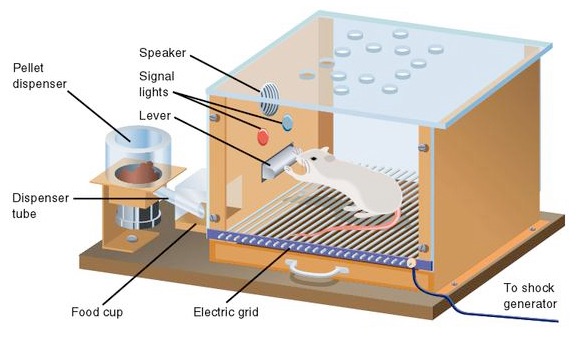
Figure 1.11 Skinner’s Box
As suggested by “Skinner’s Box”, the primary elements of operant conditioning are reinforcement and punishment. Figure 1.12 provides a visual representation of reinforcement and punishment. Reinforcement is any event that either increases or strengthens a behavior. There are two types of reinforcement.
Positive reinforcement occurs when a desirable outcomes, such as praise, or a physical reward, is presented after the response. A behavior is strengthened by the addition of a reward.
Negative reinforcement involves the removal of an undesirable outcome after the response. A behavior is strengthened by the removal of something undesirable.
Punishment is any adverse event that decreases a behavior. There are two types of punishment.
Positive punishment occurs when an adverse event is presented after a response. A behavior is weakened by the addition of something undesirable.
Negative punishment involves the removal of a desirable outcome. A behavior is weakened by the removal of something desirable.
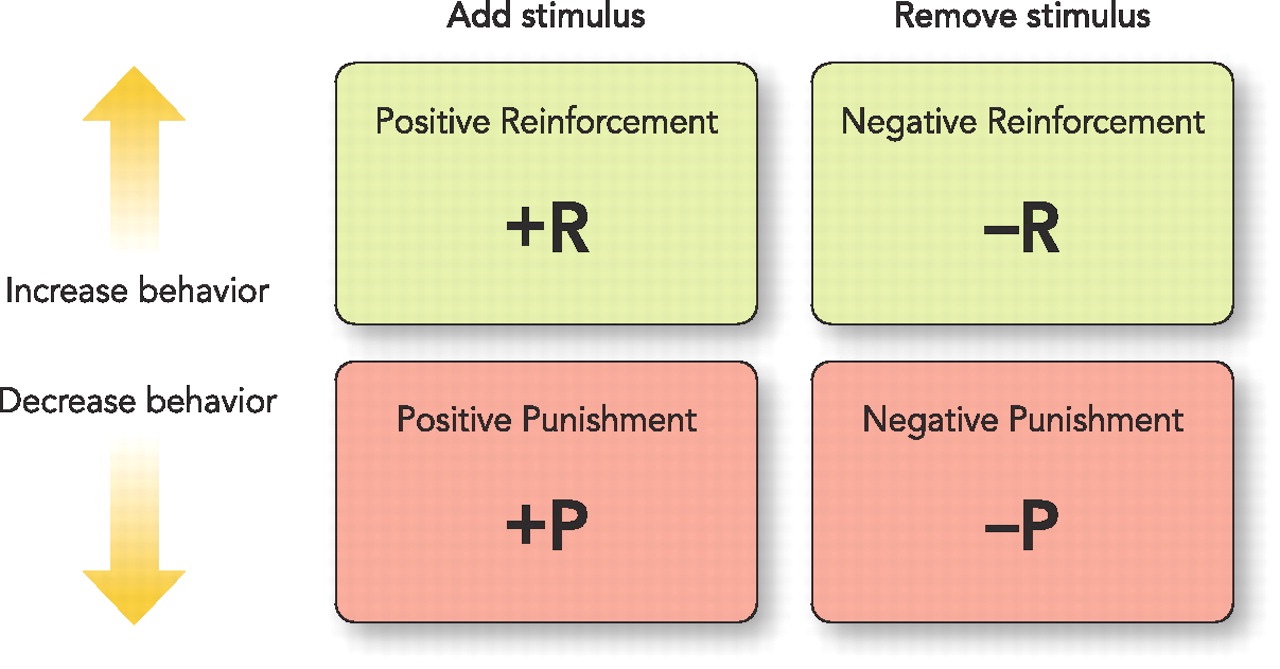
Figure 1.12 Reinforcement and Punishment
Skinner’s Box also included a device that recorded each response and was able to collect response data on different schedules of reinforcements. This work led the way for fixed-ratio, variable-interval, fixed-interval and variable-interval schedules, used to influence response and extinction rates of certain behaviors.
Operant conditioning has been applied in different ways in a variety of settings. Behavior modification, for example, is a set of techniques based on operant conditioning. The technique of timeout involves removing a person from a desirable situation as punishment for an undesirable behavior. This is negative punishment, which will weaken the bad behavior. Consider, however a setting that’s not desirable (maybe a gathering with in-laws or obnoxious colleagues) and an undesirable behavior will get you out of that setting. This is an example of negative reinforcement, which will strength the bad behavior.
A token economy is when behavior is influenced by the presentation of tokens (positive reinforcement) for desirable behavior or the removal of them for undesirable behavior (negative punishment). Tokens can eventually be exchanged for a more meaningful reward later. Principles of operant conditioning have also been applied in behavioral training programs
and in the formulation of learning or employment contracts. In social skills training for example, children and adults learn strategies for engaging in successful social situations. Then, they role-play through situations in which their behavior will result in either positive or negative outcomes. These outcomes will drive future behaviors in future social situation.
Social Learning Theory
Albert Bandura (1977a) believed that direct reinforcement could not account for all types of learning and behavior. He combined elements from behavioral theories with concepts of attention and memory and proposed social learning theory. Three core elements form the foundation of social learning theory. The first is that people can learn through observation either by 1) a live model acting out a behavior, 2) a verbal instructional model, which describes and explains a behavior, and 3) a symbolic model, that involves characters displaying behaviors in
books, movies, etc.
Bandura also believed however, that just observing someone’s actions does not always lead to learning. Rather an individual’s mental state and motivation play a part in whether a behavior is learned or not. Bandura suggested that intrinsic motivation such as pride, curiosity, and a sense of accomplishment could influence behavior as much, and perhaps more than external reinforcement.
The third element of social learning theory challenges the behavioral assumption that when learning has occurred a new behavior is displayed. Bandura proposed that through observation, people can learn new information without having to demonstrate new behaviors.
It should also be noted that not all observed behaviors are effectively learned. Factors related to both the model and the learner can influence whether learning is successful. Four elements need to be considered. In order to learn, the learner must have the capacity to attend and actually pay attention. In addition, the learner must be able to retain or store
information so that it can be retrieved at later time. Once attention has been paid to the model and information has been retained the learner needs to be able to actually reproduce or perform the behavior. Practice through repetition of the learned behavior leads to advanced skill and proficiency. The forth element is motivation. The learner must be motivated to imitate the behavior that’s been modeled. Reinforcement through goal achievement, attention, rewards, etc. can play an important role in motivation. Not every learner, however will respond to the same type of response or reward. Bandura suggested that self-efficacy, which is the belief in one’s own capacity to perform specific behaviors and execute certain actions, can heavily drive learning and influence not only the initiation of behaviors, but also the development of habits and lifestyle (Bandura,1977b; Bandura, 1998). Bandura subsequently
expanded his original theory and renamed it, Social Cognitve Theory to emphasize the major role cognition plays in decision-making and behavior (Bandura, 1986).
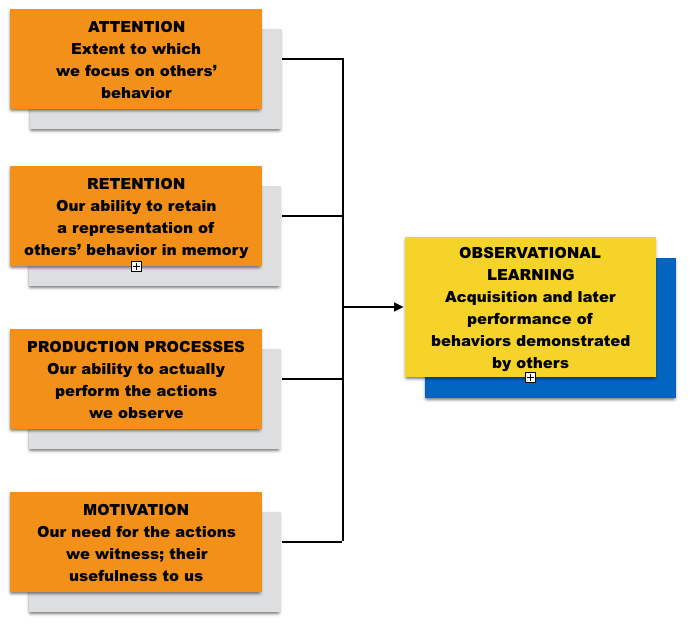
Figure 1.13 Bandura’s Social Learning Theory
Maslow’s Hierarchy of Needs
Abraham Maslow (1908-1970) also believed that motivation plays an important role in behavior and development. He proposed that people are motivated to satisfy innate human needs in priority as they progress toward self-actualization (Maslow, 2013).
Maslow described a hierarchy of five needs as illustrated in Figure 1.15 and claimed that the most basic need is for physical survival. Thus, obtaining food, water, shelter, sleep and feelings of safety and security will motivate behavior. When those needs are met, motivation is driven by psychological needs, followed by self-actualization or self-fulfillment through personal growth and peak experiences.
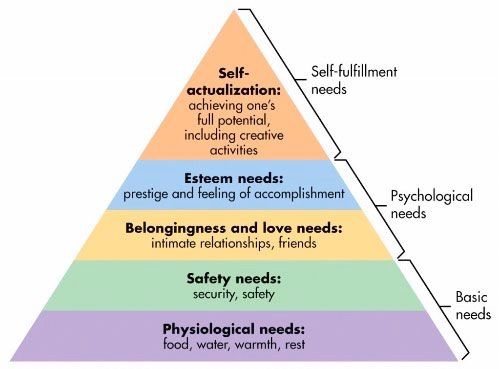
Figure 1.15 Maslow’s Hierarchy of Needs
Piaget’s Stages of Cognitive Development
Jean Piaget (1896-1980) proposed that children will innately try to explore the world and attempt to make sense of it. Through these activities, children will progress through four distinct stages of cognitive development, all the while facilitating constructs that emerge as mental operations of thought and intellect (Piaget, 1977) (Figure 1.16).
During the sensorimotor stage, infants and toddlers acquire knowledge through various sensations (e.g. touch, sound, sight, smell) and by manipulating objects of different qualities (i.e. size, shape, texture, etc.) At the beginning of this stage, infants are unaware that objects out of view continue to exist. By the end of the stage, however, toddlers have learned object permanence. This knowledge allows children to attach names and labels to objects because they have learned that objects are distinct entities and that exist outside of individual perception.
The preoperational stage is when children are actively engaging in pretend play, yet are primarily egocentric and have difficulty taking the view of other people. They struggle with logic and continue to grapple with the idea of constancy. Take for example two pieces of clay of the exact same weight. One piece is rolled into a ball, and one piece is flattened into a pancake. Even though the amount of clay is the same, the pancake looks larger. If given a choice, a child in the pre-operational stage will likely pick the pancake thinking he’s getting the most clay.
Children in the concrete operational stage are beginning to think more logically, but at least in the beginning of the stage, their thinking in quite rigid. During this stage, children will become less egocentric and are able to consider how other people might think and feel. In addition, children are developing the ability to apply systematic manipulations of symbols and objects as they encounter abstract and hypothetical concepts.
The formal operational stage is characterized by an increased use of logic, an understanding of abstract ideas, and the ability to apply deductive reasoning to situations and problems. During this stage, people develop the capacity to see multiple solutions to problems and learn to think more scientifically about the world. Interestingly, social scientists have suggested that in industrialized nations, just over a third of high school graduates achieve full formal operations (Chiappetta & Whitfield, 1977) and that many adults continue to be limited in their ability to apply logic and deal with abstract ideas.
One construct that emerges as people progress through the four states of cognitive development is described by Piaget is a schema (Piaget, 1969). A schema can function as both the process of obtaining knowledge and a category of knowledge. In this way, a schema incorporates both mental and physical actions. Through opportunities and experiences
the acquisition of new data is used to modify previously existing schemas. An example that is often used to explain the schema concept is that of a small child who’s only experience with animals has been with small dogs. The child, based on experience, might believe that all dogs (and maybe all animals) are small, furry, and have 4 legs. When the child eventually encounters a really big dog, she will be able to use the new observations and experiences to modify the existing schema. Piaget named the process of modifying an existing schema assimilation. When experiences result in the development of a new schema and changes in behavior accommodation is said to have occurred. Piaget believed that as children progress through the stages of cognitive development, they need to be able to apply previous knowledge (assimilation) and change behavior to account for new knowledge (accommodation).
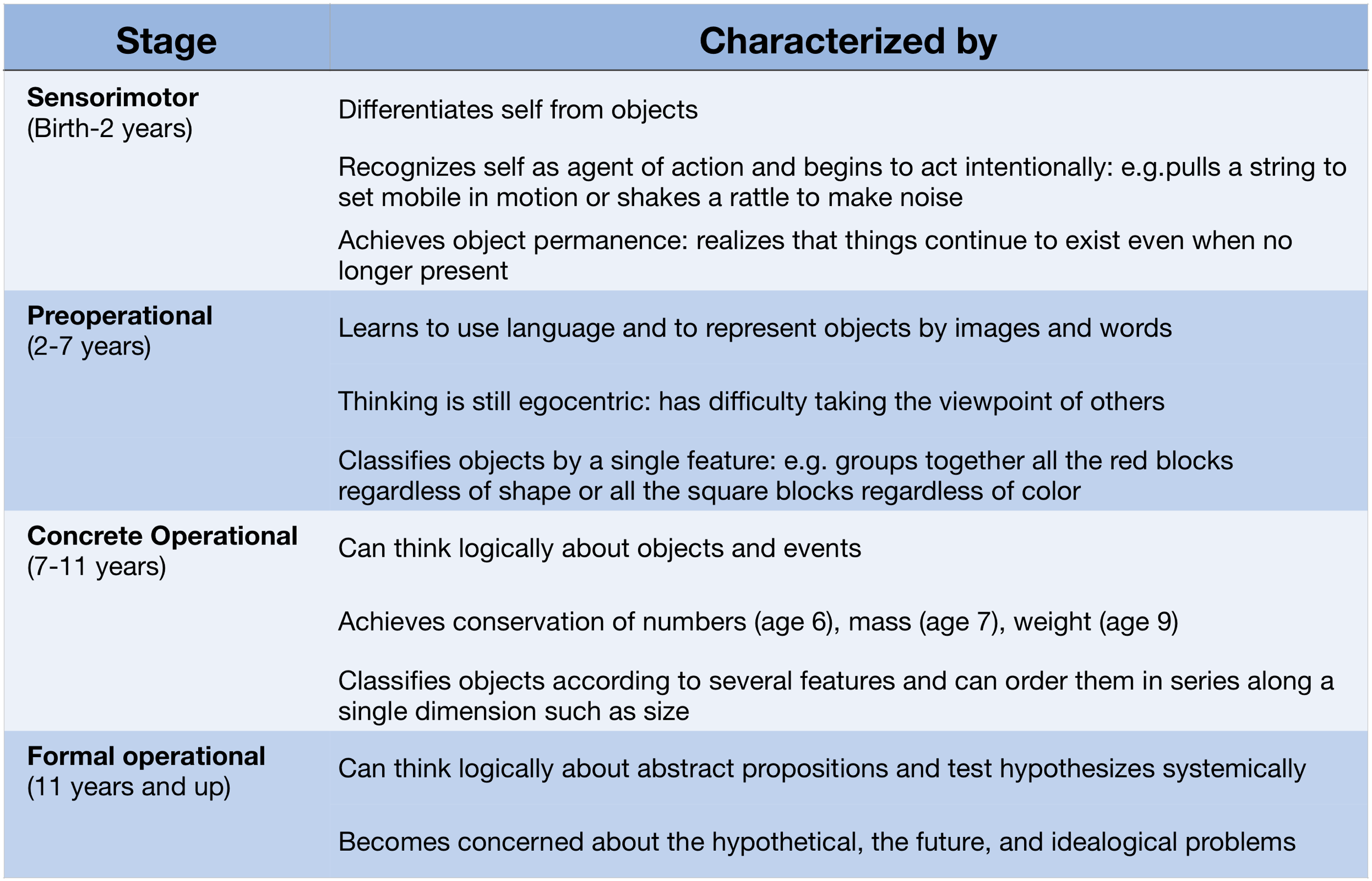
Figure 1.16 Piaget’s Stages of Cognitive Development
He coined this mechanism of balancing assimilation and accommodation, equilibration.
Gibsonian Ecological Theory of Development
Eleanor J. Gibson and her husband James J. Gibson took a different view of cognitive development even though they, along with Piaget, accepted the interweaving of cognition and movement. The Gibsons viewed cognitive development from the perspective of perception and emphasized the importance of the environment and context in learning. They believed that perception is necessary to operate on the environment that it’s designed for action, further suggesting that the perceptual and motor systems should be studied together. The Gibsons
called perceivable possibilities affordances and suggested that affordance properties of the environment (i.e. handles for pulling, tools for manipulating, etc.) have direct effects on how people perceive possibilities for purposeful action (Gibson, 1991).

Figure 1.17 Gibson’s Visual Cliff
Eleanor’s most famous work involved the “visual cliff” (Figure 1.17) in which she studied how perception influenced infants behavior of crawling toward their mothers. Nearly all the infants refused to crawl out over the glass on the “cliff” side, but nearly all of them were happy to crawl across the glass on the shallow side. This reinforced Gibson’s assumption that perception of the environment will change behavior.
The Role of Play
Although play is not considered a psychological theory of cognition, many social scientists note that play is not only important for cognitive development, it facilitates emotional development, socialization and communication. Play can also be a context in which children learn rules and norms. Figure 1.18 illustrates Mildred Parten’s (1902-1970) progression of play typically observed in toddlers and young children (Parten & Newhall, 1943). Not included in the figure is symbolic play, or pretend play. This type of play allows children to use one object to represent another. Or, children will pretend that an object is there without it being present. An example is when a child serves an empty bowl to a friend and pretends she is serving ice cream.
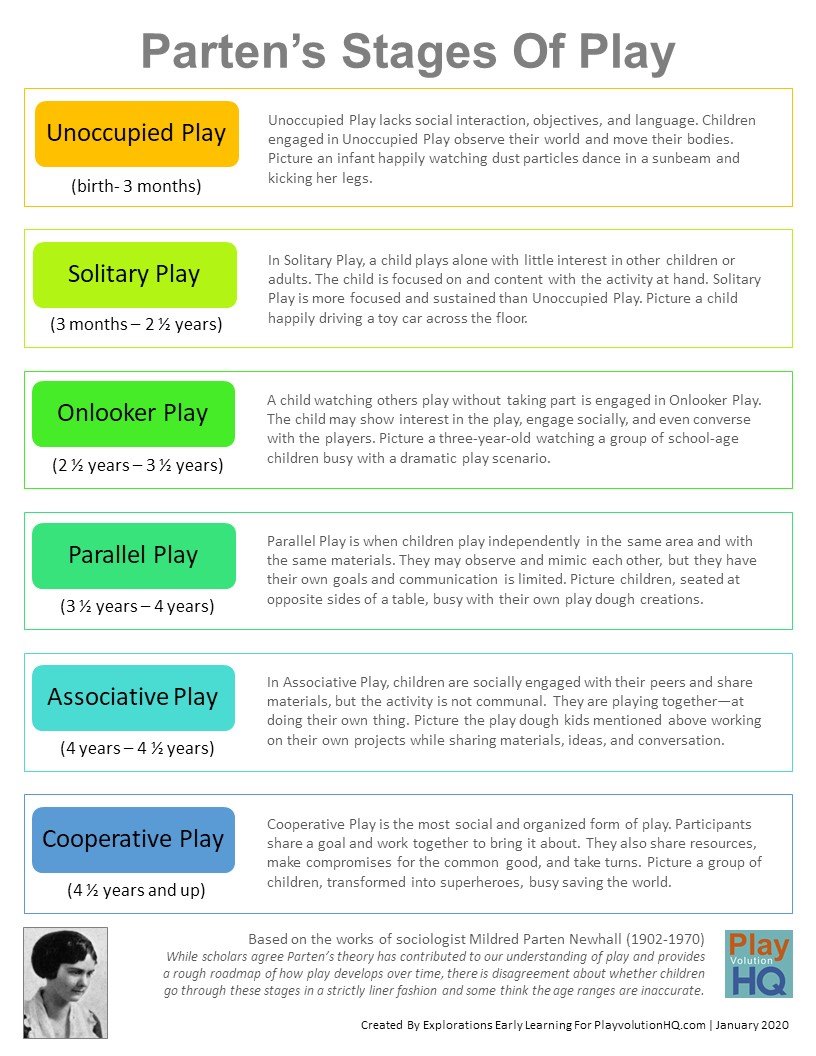
Figure 1.8 Parten’s Stages of Play
Final Thoughts
Biological, cognitive, and psychological theories of development serve to explain how humans behave and experience the world. Not all theories of development have been covered in this chapter. However, what has been presented are several theories that can, and arguably should, be considered when working with clients who either need habilitation or rehabilitation. It is well accepted that there is not one perfect theory to explain all human behavior. Perhaps the whole person is best understood when several theories are combined to explain the person’s development. Viewed as a process of change, development “…reflects the transactional nature of our interaction with the environment and encompasses our need to survive, organize and adapt to our surrounding” (Cech and Martin, 2002).
References
Bandura, A. Social Learning Theory. Englewood Cliffs, NJ: Prentice Hall, 1977a.
Bandura, A. (1977b). Self-efficacy: toward a unifying theory of behavioral change. Psychological Review, 84(2), 191-215.
Bandura, A. Social Foundations of Thought and Action: A Social Cognitive Theory. Englewood Cliffs, NJ: Prentice Hall, 1986.
Bandura, A. (1998). Health promotion for the perspective of social cognitive theory. Psychology and Health, 13, 623-649.
Bernstein, N. The Coordination and Regulation of Movements. London: Pergamon, 1967.
Bari, A., & Robbins, T.W. (2013). Inhibition and impulsivity: behavioral and neural basis of response control. Progress in
Neurobiology, 108, 44-79.
Bernstein, N. (1967). The coordination and regulation of movement. London, UK: Pergamon.
Belsky, J., & Pluess, M. (2009). Beyond diathesis stress: Differential susceptibility to environmental influences. Psychological Bulletin, 35(6), 885-908.
Bobath, B. Adult Hemiplegia: Evaluation and Treatment, 2nd Ed, London: W. Heinemann Medical Books, 1978
Brunnstrom, S. Movement Therapy in Hemiplegia: A Neurophysiological Approach. New York: Harper and Row, 1970.
Chiappetta, E.L., & Whitfield, T.D. (1997). An examination of Cognitive development among academically tracked high school seniors. The High School Journal, 61(1), 31-37.
Clifford, M.M., & Walster, E. (1973). The effect of physical attractiveness on teacher expectations. Sociology of Education, 46(2), 248-258.
Campbell, J., Schermer, J. A., Villani, V. C., Nguyen, B., Vickers, L., & Vernon, P. A. (2009). A behavioral genetic study of the dark triad of personality and moral development. Twin Research and Human Genetics, 12(2), 132-136.
Carr J., Shepherd R., & Gordon, J. (Eds.) Movement science: foundations for physical therapy in rehabilitation. Rockville, MD: Aspen, 1987.
Cech, D.J., & Martin, S.T. Functional Movement Development Across the Lifespan. St. Louis, MO: Elsevier, 2012.
Erikson, E. Indentity and the Lifecycle, New York: W.W. Norton, 1980.
Freud, S. The Complete Psychological Works of Sigmund
Freud, James Stratchey, Ed., London: W.W. Norton, 1976.
Freud, A. The Ego and the Mechanisms of Defense: The Writings of Anna Freud, Madison, CT: International Universities Press, Inc., 1967.
Gesell, A. Infancy and Human Growth. New York, NY: Macmillian Publishers, 1928.
Gesell’s infant growth orientation: a composite.. (n.d.) >The Free Library. (2014). Retrieved Dec 27 2021 from https://www.thefreelibrary.com/Gesell%27s+infant+growth+orientation%3a+a+composite.-a0126582637
Gibson, E.J. An Odyssey in Learning and Perception. Cambridge, MA: MIT Press, 1991.
Grillner, S (1981) Control of locomotion in bipeds, tetrapods and fish. In V. Brooks (Ed.) Handbook of physiology. The Nervous system. Motor control (Vol. II, part 2, pp. 1179-1236). Baltimore, MD: Lippincott Williams & Wilkins.
Keele, S. W. (1968). Movement control in skilled motor performance, Psychological Bulletin, 70(6, Pt.1), 387-403.
Kelso, J.A.S. & Tuller, B. (1984). A dynamical basis for action systems. In Gazzaniga, M.S. (Ed.) Handbook of cognitive neuroscience (pp. 321-356). New York, NY: Plenum.
Lindquist, K. A., Satpute, A. B., Wager, T. D., Weber, J., &
Barrett, L.F. (2016). The brain basis of positive and negative affect: evidence from a meta-analysis of the human neuroimaging literature. Cerebral Cortex, 26(5),1910-1922.
Maslow, A.H. A Theory of Human Motivation, Eastford, CT: Martino Fine Books, 2013
McGraw, M. B. (1940). Neuromuscular development of the human infant as exemplified in the achievement of erect locomotion, Journal of Pediatrics, 17, 747-771.
McGraw, M. B. (1939). Swimming behavior of the human infant. Journal of Pediatrics, 15, 485-490.
McGraw, M.B. (1940). Suspension grasp behavior of the human infant. American Journal of Diseases of Children,
60(4), 799-811.
Newell, K. M. Constraints on the development of coordination. In M.G. Wade & H.T.A. Whiting (Eds.), Motor Development in Children: Aspects of Coordination and Control
(pp.241-361). Amsterdam: Nijhoff, 1986.
Parten, M., & Newhall, S. M. Social behavior of preschool children. In R. G. Barker, J. S. Kounin, & H. F. Wright (Eds.), Child behavior and development: A course of representative studies (pp. 509–523). New York: McGraw-Hill, 1943.
Pavlov, I.P. Conditioned Reflexes, G.P. Anrep, Ed., Mineola, NY: Dover Publications, 1984.
Piaget, J. The Psychology of the Child, New York: Basic Books, 1969.
Piaget, J. The role of action and the development of thinking. In Overton, W.F. and Galagher, J. M. (Eds.) Knowledge and Development (pp. 17-42). Boston, MA: Springer.
Reis, H. T., Wheeler, L., Spiegel, N., Kernis, M.H., Nezlek, J., & Perri, M. (1982). Physical attractiveness in social interaction: II. Why does appearance affect social experience? Journal of
Personality and Social Psychology, 43(5), 979-996.
Saudino, K. J. (2005). Behavioral genetics and child temperament. Journal of Developmental Behavioral and Pediatrics, 26(3), 214-223.
Skinner, B. F. The Behavior of Organism. New York: Appleton-Centry-Crofts, 1938.
Sorell, G. T., & Nowak, C. A. (1981). The role of physical attractiveness as a contributor to individual development. In
R.M. Lerner & N.A. Busch-Rossnagel (Eds.), Individuals as producers of their development: A life-span perspective (pp. 389-446). New York, NY: Academic Press.
Thelen, E. and Smith, L.B. (1994) A Dynamic Systems Approach to the Development of Cognition and Action. Cambridge, MA: MIT Press.
Thorndike, E.L.The Fundamentals of Learning. New York: Teachers College, Columbia University, 1932.
Watson, J.B. Behaviorism, London: W.W. Norton and Co., 1930.
Watson, J.B. (2013). Psychology as a behaviorist views it. Psychological Review, 20, 158-177.
Wilson, D. M. (1961). The central nervous control of flight in a locust. Journal of Experimental Biology, 38, 471-490.
Wolpe, J.M. Life Without Fear: Anxiety and Its Cure, Oakland, CA: New Harbinger Publishers, 1988.
Woollacott, M, & Shumway-Cook, A. (1990). Changes in posture control across the life span: a systems approach. Physical Therapy, 70, 799-807.
Images
Title page. Stage of Life. [Image File]. Retrieved from https:// pixabay.com/en/stage-of-life-childhood-life-1287959/
Figure 1.1 Growth Chart for Boys, Birth -36 mos. [Image File]. Retrieved from https://www.cdc.gov/growthcharts/ data/set1clinical/cj41c017.pdf
Figure 1.2 Newell’s Model of Constraints (1986). [Image File]. Retrieved from http://teamgymshorts4.weebly.com/uploads/ 5/1/7/3/51736319/4456688.jpg?466
Figure 1.3 Tennis playerTom Egberlinke [Image File]. Retrieved from https://www.paralympic.org/news/france-speifer-famin-chosen-roland-garros-wild-cards
Figure 1.4 ATNR [Image File]. Retrieved from https://c1.staticflickr.com/9/8334/8416688993_cf3405ace5_m.jpg
Figure 1.5 McGraw’s Phases of Erect Locomotion (McGraw, 1940) McGraw, M. B. (1940). Neuromuscular development of the human infant as exemplified in the achievement of erect
locomotion, The Journal of Pediatrics, 17, 747-771.
Figure 1.6 Freud’s Theory of Personality. [Image File]. Retrieved from http://1.bp.blogspot.com/_6UvBV-BprQA/TRCoIfhroSI/AAAAAAAAAA4/vip5vuFYT-Q/s320/id-ego superego%255B1%255D.gif
Figure 1.8 Freud’s Defense Mechanisms. [Image File]. Retrieved from https://www.simplypsychology.org/defensemechanisms.jpg
Figure 1.10 Pavlov’s Dog. [Image File]. Retrieved from https://www.simplypsychology.org/Pavlov2.jpg
Figure 1.11 Skinner’s Box. [Image File]. Retrieved from https://www.simplypsychology.org/skinner%20box.jpg
Figure 1.12 Skinner’s Reinforcement and Punishment. [Image File]. Retrieved from http://physiologyonline.physiology.org/content/nips/27/3/167/F2.large.jpg
Figure 1.14 Behavioral Cartoon. [Image File]. Retrieved from https://s-media-cache-ak0.pinimg.com/originals/ba/a5/b8/baa5b81ab4333b88247787b40fe356d6.jpg
Figure 1.15 Maslow’s Hierarchy of Needs. [Image File]. Retrieved from https://www.simplypsychology.org/maslowpyramid.jpg
Figure 1.16 Piaget’s Stages of Cognitive Development. [Image File]. Adapted from http://campnfam.com/galleries/piaget-4-stages-of-cognitive-development-chart-i12.png
Figure 1.17 Gibson’s Visual Cliff. [Image File]. Retrieved from http://study.com/cimages/multimages/16/Visual_Cliff.jpg
Figure 1.18 Parton’s Stages of Play. [Image File]. Retrieved from https://playvolutionhq.com/forms/handout-partensstages-of-play/
